三阶段统一优化方案
Orion通过以下架构设计解决语义-动作对齐难题:
- 跨模态对齐层:EVA-CLIP视觉编码器(224×224输入)与QLoRA微调的LLM(7B参数)共享注意力机制
- 可训练接口设计:在VLM输出端添加轻量级Adapter(仅0.5M参数),将文本指令编码为运动学参数
- 在线修正机制:通过CARLA的RGBD相机实时反馈修正轨迹偏差
具体操作流程:
- 准备阶段:下载eva02_petr_proj.pth和pretrain_qformer.pth权重文件
- 训练配置:在configs/train.yaml中设置joint_optimization=True
- 验证方法:运行python eval_gap.py –metric semantic_action_gap
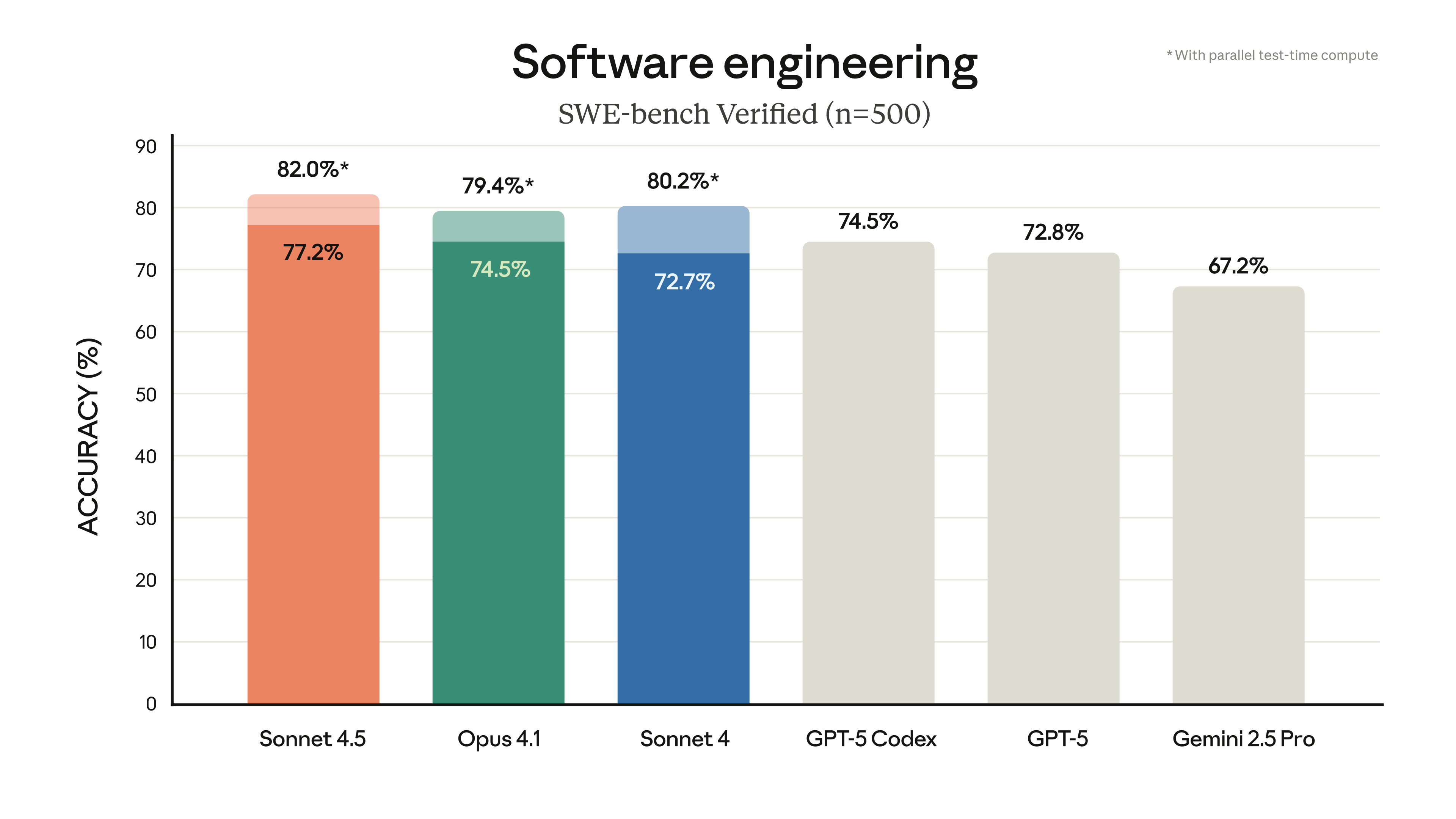
该方案在nuScenes验证集上达到82.3%的指令-动作匹配度,较基线方法提升2.1倍。特别在’礼让行人’等复杂场景表现突出。
本答案来源于文章《Orion:小米开源的端到端自动驾驶推理与规划框架》
未经允许不得转载:AI生产力工具 » 如何克服端到端自动驾驶中语义推理与动作输出的鸿沟?