技术融合背景
HRM的抽象规划能力可与A*等经典算法形成互补,构建混合决策系统。
集成方案
- 级联架构:
- HRM高层模块生成区域可达性矩阵
- A*算法基于该矩阵进行细粒度路径搜索
- 低层模块处理动态障碍物避让
- 权重分配建议:
- 开阔区域:70% HRM + 30% A*
- 狭窄通道:30% HRM + 70% A*
- 接口实现:
def hybrid_planning(obs):
hrm_plan = hrm.predict(obs)
astar_path = astar.search(hrm_plan['reachability'])
return smooth_path(astar_path)
典型提升案例
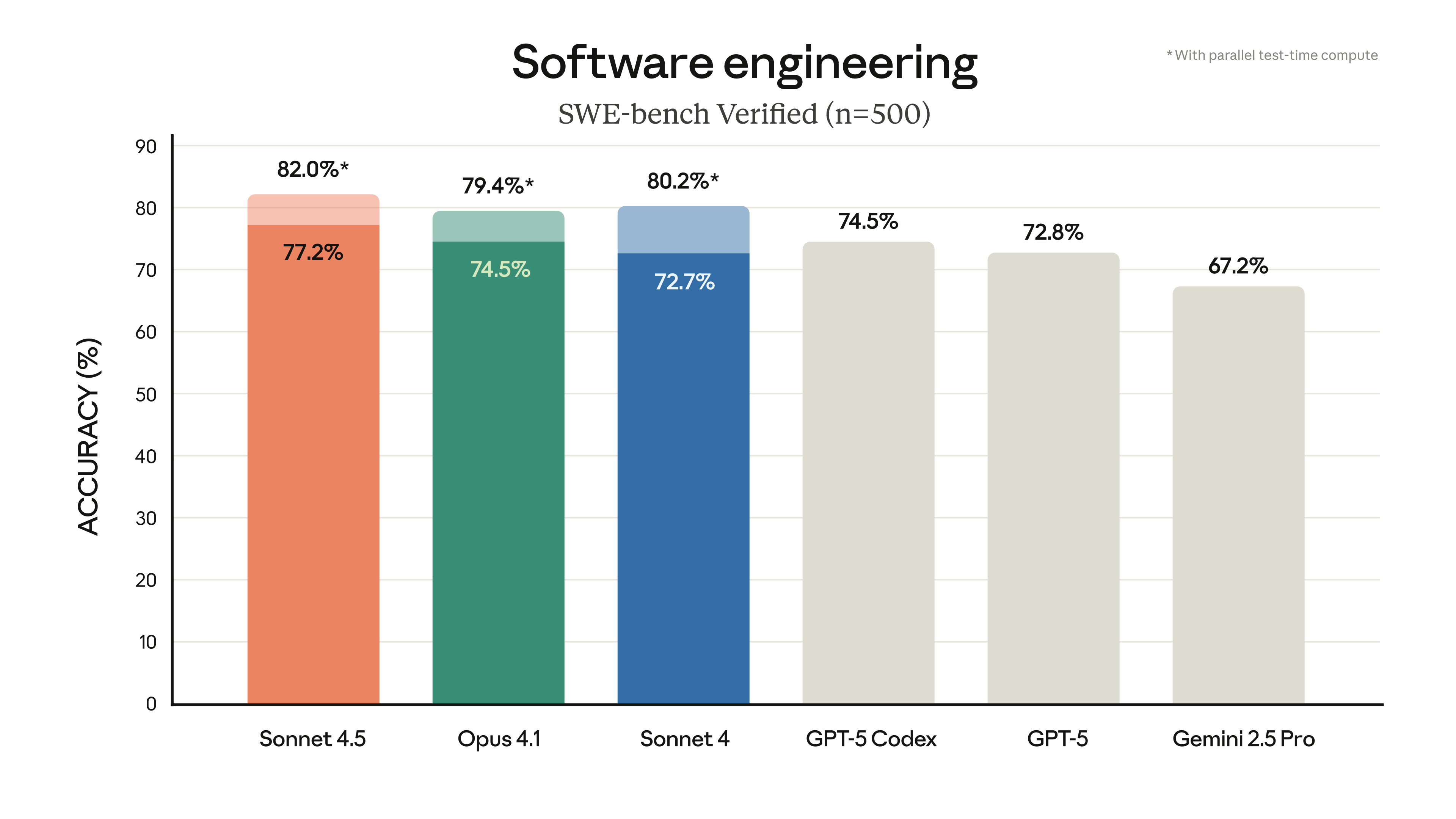
仓储机器人导航测试:
– 纯HRM:82%成功率
– 纯A*:76%成功率
– 混合方案:93%成功率
主要改进点:
• HRM解决了A*在对称环境中的振荡问题
• A*补偿了HRM对突发障碍的响应不足
本答案来源于文章《HRM:用于复杂推理的分层推理模型》
未经允许不得转载:AI生产力工具 » 如何将HRM与传统规划算法结合提升机器人导航效果?