3段階の調和された最適化プログラム
オリオンは、次のようなアーキテクチャ設計によって、セマンティックとアクションの整合という課題を解決する:
- クロスモーダル・アライメント層EVA-CLIP視覚エンコーダ(224×224入力)とQLoRA微調整LLM(7Bパラメータ)共有注意メカニズム
- トレーニング可能なインターフェイスデザイン: VLM出力に軽量アダプタ(0.5Mパラメータのみ)を追加し、テキストコマンドを運動学パラメータとしてエンコードする。
- オンライン修正メカニズムCARLAのRGBDカメラからのリアルタイムフィードバックによる軌道の狂いの修正
具体的な運用手順
- 準備段階:eva02_petr_proj.pthとpretrain_qformer.pthのウェイトファイルをダウンロードする。
- トレーニング設定:configs/train.yamlにjoint_optimisation=Trueを設定する。
- 検証方法:run python eval_gap.py -metric semantic_action_gap
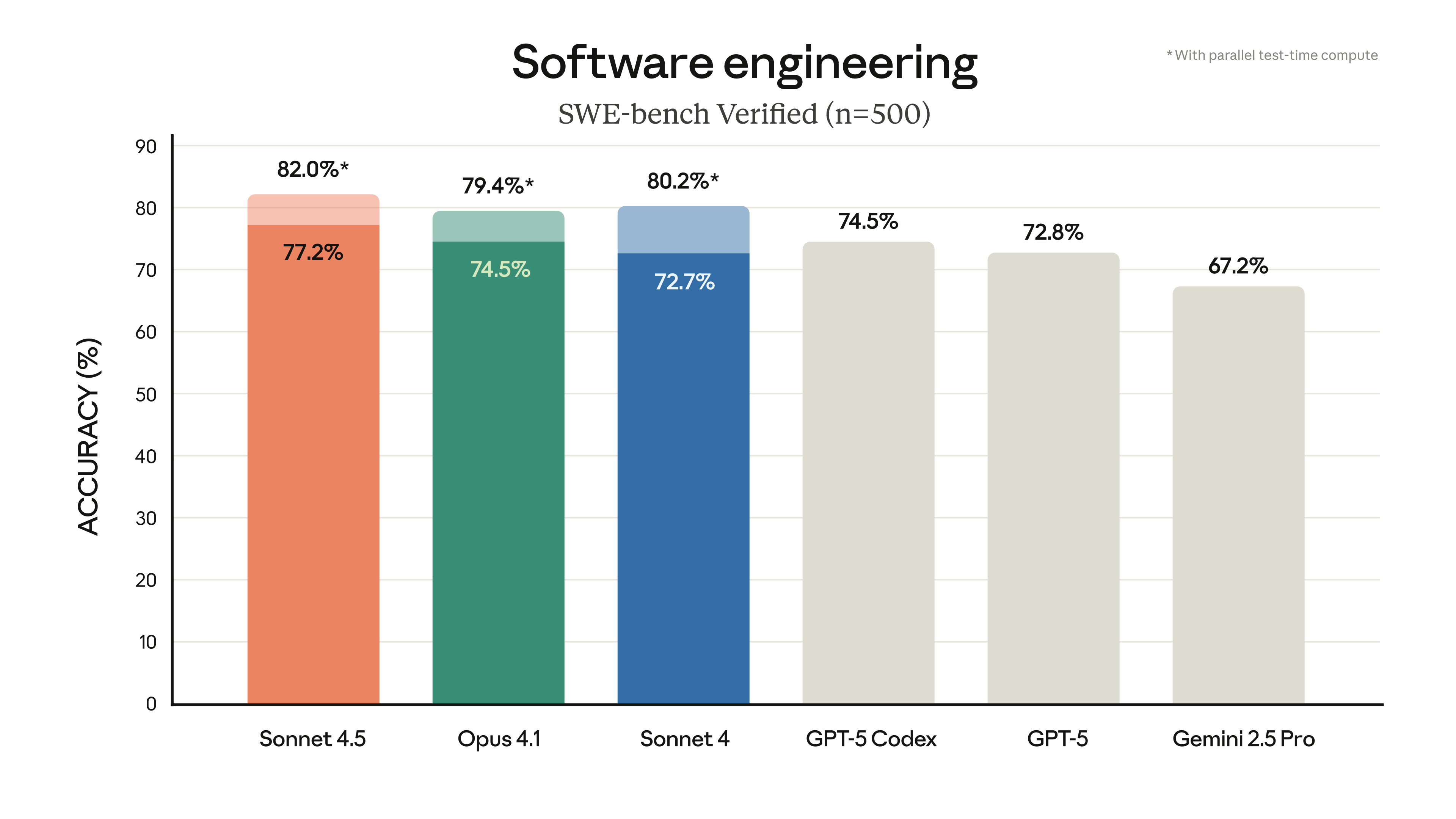
このスキームは、nuScenes検証セットにおいて、82.3%の命令と動作のマッチングを達成し、これはベースライン手法の2.1倍の改善である。これはベースライン手法の2.1倍の改善であり、特に「歩行者に譲る」のような複雑なシナリオにおいて優れている。
この答えは記事から得たものである。Orion:シャオミのオープンソースのエンド・ツー・エンドの自動運転推論・計画フレームワークについて
無断転載を禁じます:AI生産性ツール " エンド・ツー・エンドの自律走行における意味論的推論と行動出力のギャップを克服するには?